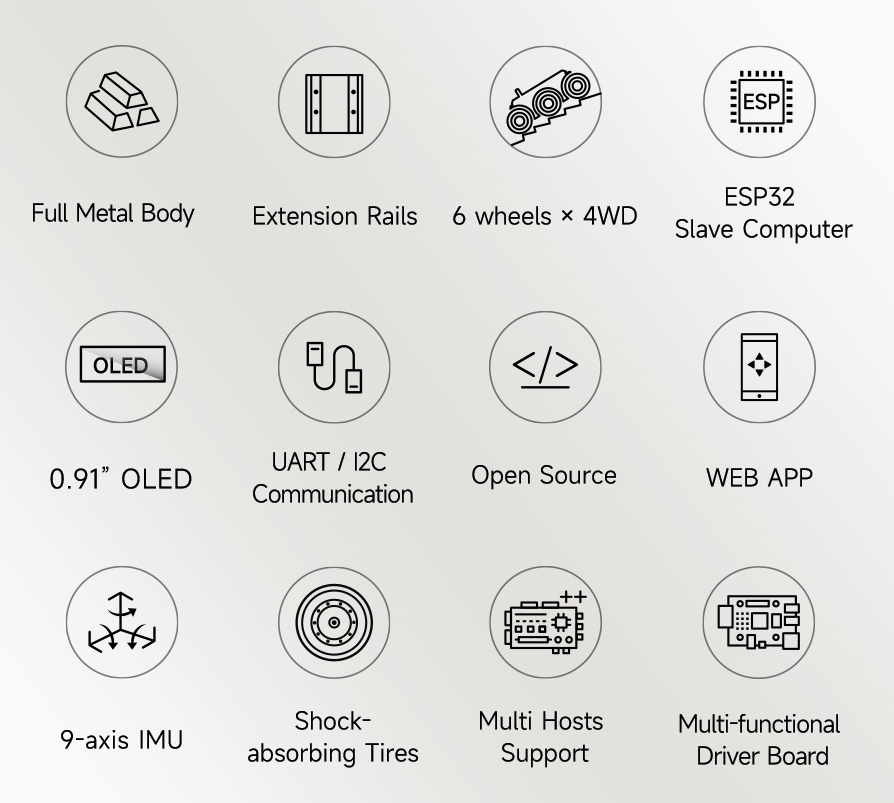
The UGV02 series is a 6 wheels × 4WD mobile robot chassis, which features superb off-road crossing ability and shock-absorbing performance, open source all code for secondary development. It supports multiple host computers (Raspberry Pi, Jetson Nano, Jetson Orin Nano, etc), the host computer can communicate with the ESP32 slave computer through the serial port.
The design of 6 wheels × 4WD increases the contact area with the ground and load capacity, and provides strong power. Built in 3S UPS power supply module, supports 3 x 18650 Li batteries (in series, NOT included), which provides uninterruptible power for the robot and supports charging and power output at the same time. Built in multi-functional robot driver board, based on ESP32, with onboard WIFI and Bluetooth, for driving serial bus servos, outputting PWM signal, expanding TF card slot, etc.

The UGV02 adopts flexible rubber tires which greatly reduce the impact of complex terrains, can easily meet the needs of heavy loads, shock absorption, and off-road. Also, it comes with 2 x 1020 European standard profile rails, provides more possibilities for secondary development.
High Strength aluminum body
The car body is made of 2mm thickness 5052 Aluminum Alloy which can effectively protect the internal structure during use and enhance the overall stability and durability

Superb shock absorption performance
The excellent shock absorption design can reduce the damage by road obstacles to the internal and external components during drivng, thus extending the service life in complex terrain scenarios.

High-quality flexible rubber tire
When running in rough terrain, the flexible rubber tires can deform slightly to increase friction with the ground and improve its stability
Open-source demos including Web applications
If the robot is not connected to a known WiFi after powering on, it will automatically establish a hotspot. After connecting to this hotspot by your phone or computer, you can open the browser for wireless remote control. Supports secondary development of this open-source Web application and adding new custom functions.

Aluminum rail
Comes with 2 x 1020 European standard profile rails, and supports installing additional peripherals via the boat nuts to meet different needs, easily expanding the special operation scenarios. Also including a Picatinny rail, boat nuts and M4 screws in the package.

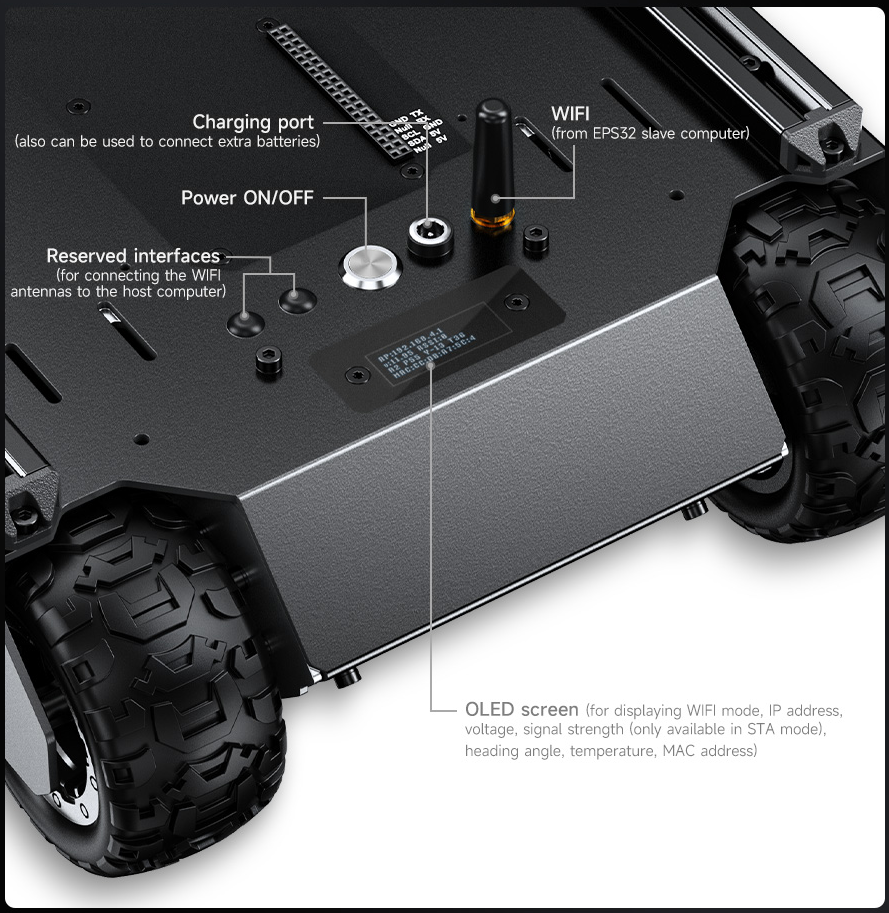
Rich Interfaces and Peripherals
0.91inch OLED display screen: the display content can be modified via Web application or the host UART interface.
Supports driving in complex terrain
6 wheels x 4WD design, using 6 wheels can provide a more stable platform and larger contact area, while 4WD can provide stronger power and traction to deal with various terrains and obstacles
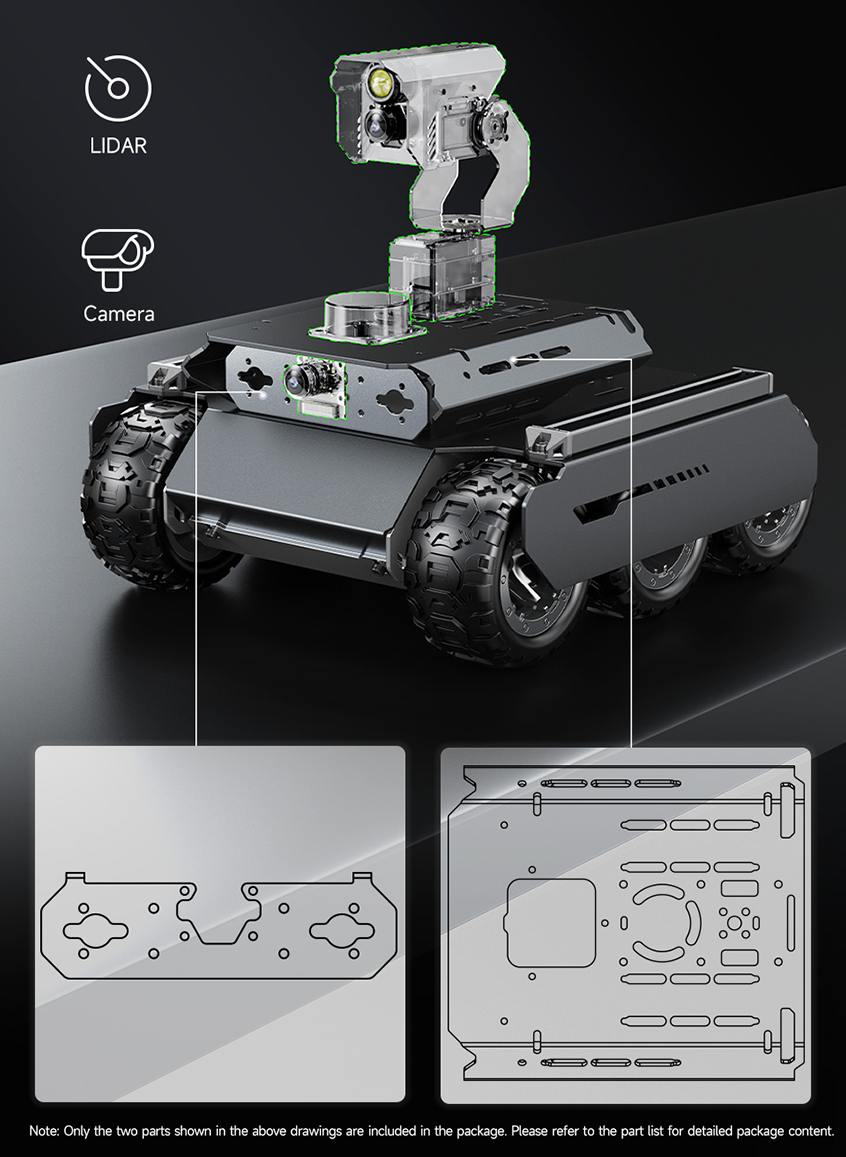
Comes with a multi-functional mounting plate
Can be used to install a variety of peripherals, including LD19 lidar, STL 27L lidar, camera, or other modules. Open source for DXF drawing and 3D model, which is more convenient for secondary development.
Multi Host Support
Connect to Jetson Orin Nano, Raspberry Pi 4B or Raspberry Pi Zero
Rich open-source demos - Directly control a variety of peripherals
Supports sending JSON commands via Web application or UART communication to control a variety of peripherals, such as control and configure the serial bus servo, obtain the servo feedbck and IMU information, control the angle of PWM servos, modify the content of the OLED display, etc. more convinient for host development.

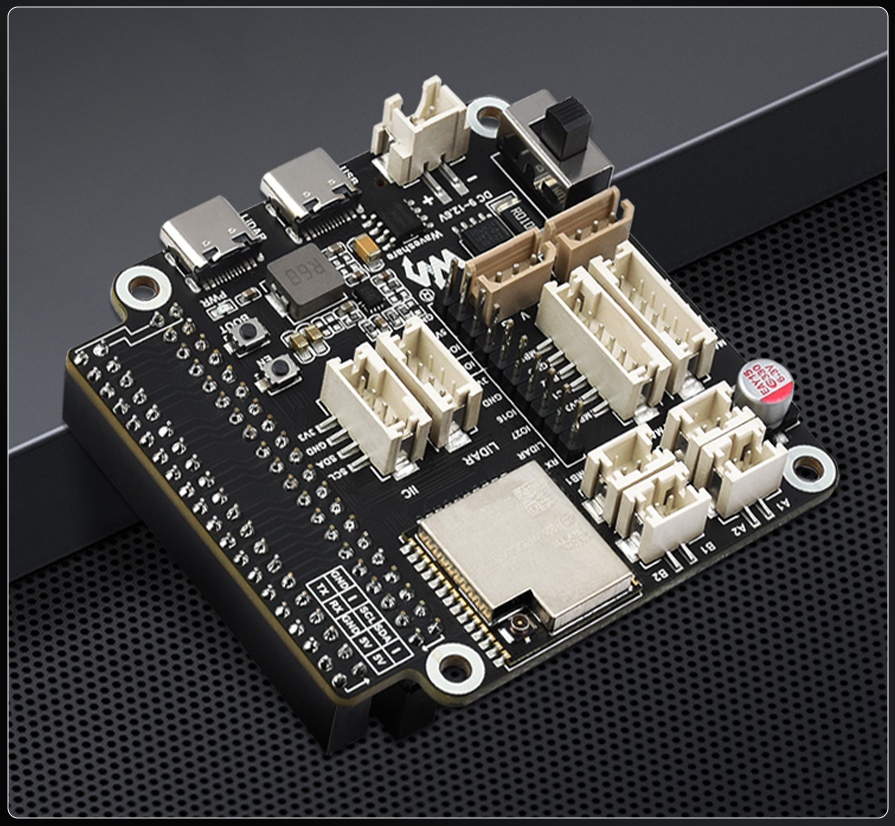
Multi-functional robot driver board
Based on ESP32, not only open source the entire code of the UGV02 but also the demos of each module of this driver board, which is convenient for secondary development.
Expanding multi functions for driving the DC motor, serial bus servo, OLED screen interface, TF card slot. Onboard 9-axis IMU, WIFI and bluetooth module. Can be used independently even without the host computer.
3S Lithium battery - UPS power supply module
3 x 18650 in series (NOT included) as the power for the robot, can output 5V and 3.3V for external devices. Onboard INA219 chip for detecting voltage/current information and so on. Supports charging and power output at the same time, allowing uninterrupted development